

撰文 李信马
在刚刚过去的世界人工智能大会(以下简称“WAIC”)上,智能驾驶一如过去的几届,是热门的参展区域。其中,特斯拉的展位,成为人流的中心,作为智能驾驶端到端技术路线的代表性企业,特斯拉FSD使用单一神经网络,直接将传感器输入映射到车辆控制输出,达到了良好的效果,目前在这条路线上走的最远。
不过,单车智能水平的提升,能让整个交通系统的效率也随之提升吗?
在2022年,特斯拉CEO马斯克曾提出:“智能驾驶技术普及初期,会加剧交通拥堵。”此前,也有研究机构得出了类似的结论,在武汉,百度无人出租车与人类司机间也上演了不少“速度与激情”。
在马斯克眼中,这可能是智能驾驶技术彻底成熟并普及前“难免会出现的一些曲折”。不过,也许我们还可以有别的选择来做补充。在WAIC展览馆中,紧贴着特斯拉展位的,是一家独角兽企业——蘑菇车联。
蘑菇车联成立于2017年,主要聚焦于构建一套一比一还原物理世界的实时虚拟世界网络,并深度理解、推理决策、总结输出的空间智能AI技术,使包括智能汽车、无人机、机器狗等智能体实现与物理世界的实时交互和全局协同。这套物理AI,被行业普遍认为是通向AGI(通用人工智能)的关键。
就像大模型技术对特斯拉端到端技术的推动,蘑菇车联也同样受益于大模型技术的发展,在本届WAIC上,蘑菇车联推出了首个物理世界认知模型 —— MogoMind大模型,成为本届大会最受关注的人工智能技术应用之一。大会期间,凭借MogoMind大模型及AI网络,蘑菇车联还入选了“中国中小企业协会推荐人工智能解决方案”。
DoNews受邀对蘑菇车联进行采访,了解了MogoMind大模型的“前世今生”,还有未来蘑菇车联的战略方向及布局。
详解MogoMind
据了解,MogoMind的立项在3年前,2022年底ChatGPT发布之后,全球出现了AGI热潮。当时行业主要聚焦在通用大语言模型,但蘑菇车联认为,未来的AI模型必定会走出虚拟世界,向物理世界渗透。
蘑菇车联打造MogoMind的初衷,就是打造一个物理世界的搜索引擎,它能够通过感知、整合、分析物理世界的实时动态数据,形成全局感知、深度认知、实时推理决策能力,成为城市和交通高效运行的“AI数字基座”。
相比网络环境,现实中的交通环境要复杂的多,AI从虚拟世界进入物理世界的落地,存在两大痛点:
- 传统大语言模型只能处理静态文本,无法处理多模态信息流和物理世界实时数据,更无法通过互联网数据信息预测现实世界。
- 目前大多数AI系统仅仅是单体智能,无法对整个城市交通效率进行全局优化。单点的问题需要单点解决,系统性的问题需要系统解决。
那么,对这两个痛点,蘑菇车联是怎么解决的呢?首先,MogoMind整合了道路传感器、车载终端等多种设备,形成全方位、立体化的物理世界感知网络。通过边缘计算技术,数据在源头就可以完成初步的处理,大幅缩短传输与分析时间,实现对道路状况、车辆行驶状态、行人轨迹、气象条件等物理信息的毫秒级感知。
其次,和相对专注单车智能的特斯拉不同,蘑菇车联以MogoMind大模型为核心打造“全局智能”,通过多源数据融合、长尾场景学习、复杂路口决策、多车群体协同等,构筑了高阶智驾的基石,从下图可以看出,蘑菇车联的AI网络基础设施业务分为四层,最底下是设备层,其上是系统层、算法层和业务层。
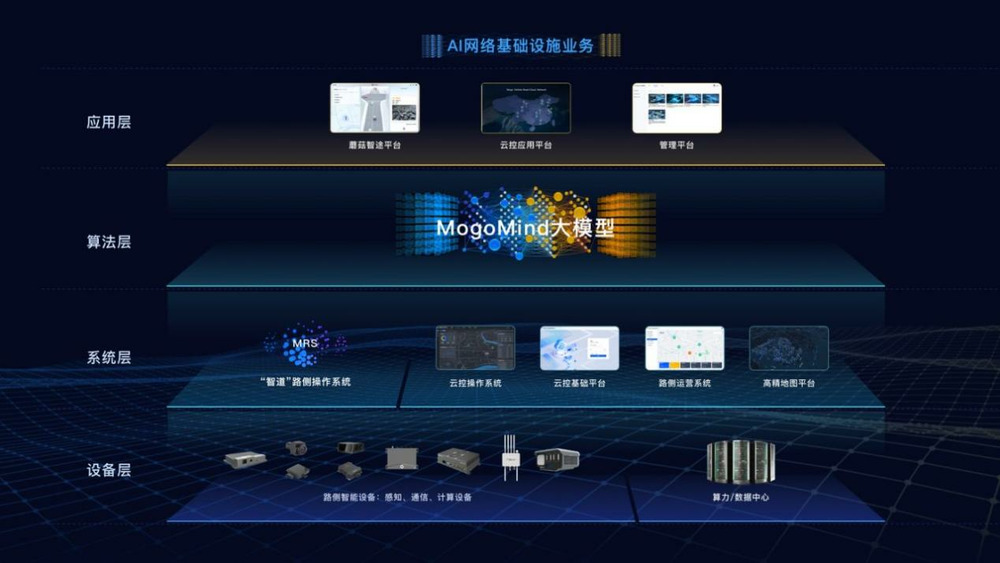
这样的架构保证了,MogoMind可以实现实时性——快速完成从数据到决策的闭环,比如道路突发交通事件时,在数秒内实现超视距实时感知,迅速计算出受影响的路段范围,实时规划最优路径,并将预警信息推送至周边车辆和交通管理部门;全域性,构建起覆盖城市每一条道路、每一个角落的实时感知网络,实现交通管理的 “无死角” 覆盖;平台化,能够无缝接入来自不同厂商、不同类型的交通设备与系统,并提供标准化接口,方便车企接入平台数据进行功能适配与应用开发。
“物理世界的问题,需要物理AI去破解,系统性的问题,需要系统去解决。这就是MogoMind大模型希望去解决的。”采访中,蘑菇车联的业务负责人总结道。
落地场景与实践
不同于现在多数专注于智能驾驶尤其是单车智能的大模型,蘑菇车联的基因决定了,MogoMind大模型的落地场景要更广泛和全面。
据了解,目前MogoMind大模型主要应用场景是交通管理、出行服务和智能驾驶:
在交通管理中,MogoMind可以担当城市的“决策中枢”,助力交通管理者掌握城市交通运行全貌,做出科学决策,实现交通管理整体协同优化;在出行服务方面,成为车辆行驶的“AI全能副驾”,提供物理世界实时信息深度理解与规划决策服务;在智能驾驶中,通过多源数据融合和长尾场景持续学习,反哺智能驾驶模型训练,提升技术安全性和可靠性。
“当然,随着技术与行业的成熟,MogoMind大模型还将广泛应用于低空无人机、机器人等领域,为城市与管理者赋能。”该业务负责人表示。
交通及城市管理行业事关人身和财产安全,对大模型的稳定性和可靠性要求很高,不能像通用大模型一样出现“幻觉”。下图可以看到,MogoMind通过深度整合实时、海量的多模态交通数据,从物理世界的复杂数据中抽取意义、从经验中学习规则,大幅度提升了模型性能,形成对交通环境的全局感知、深度认知和实时推理决策能力。
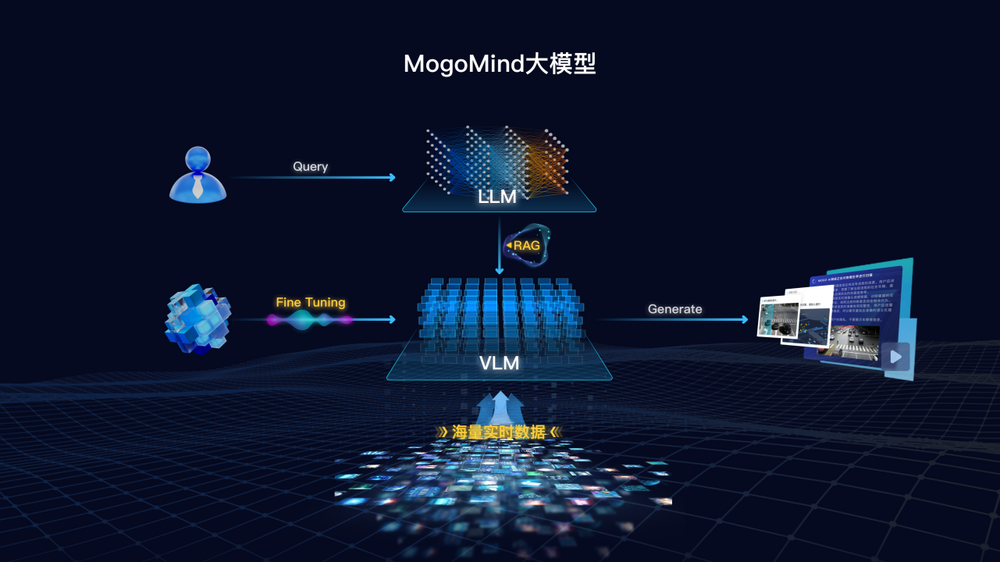
目前,MogoMind的感知精度和认知准确度均达到90%,多模态图例准确率超过88%。据蘑菇车联提供的资料显示,MogoMind能够推演的交通场景数量已经超过800个,其长尾场景处理综合准确率超过85%,交通管理提效比例约35%,缓解交通拥堵效果约30%。
据介绍,蘑菇车联已经与地方政府、多家车企开展了深度合作。
相比过去的智慧城市项目,蘑菇车联的产品已经在技术上与之拉开了代际差。MogoMind属于物理AI技术的运用,而之前的项目可能还不存在物理AI的概念与运用。另一方面,随着科技的进步和经济的发展,当前的城市基础设施、网络设施、车辆保有量与智能化水平均有快速的发展,数据来源更多源、场景更丰富,处理的问题也更复杂,和多年前不可同日而语。
此前,MogoMind大模型已经在北京、上海、沈阳、长春、鄂尔多斯、桐乡、南京、无锡、武汉、广州等城市落地验证和实地部署,比如在上海嘉定提供智能驾驶短途接驳服务,在北京顺义落地了国内首个开放式5G商用智慧交通车路协同项目,在湖南衡阳打造了首个城市级AI网络项目,完成38公里主干道路的智能网联化升级,实现近300台智能网联汽车实际运行等,都获得了地方政府和业界高度评价。
在有关和车企的合作方面,该业务负责人介绍到:“我们与车企的合作模式主要有两种,即前装量产和后装升级,前者为车企定制智能驾驶域控制器(如之前与多家车企合作的L4级RoboTaxi),直接嵌入车规级AI芯片和MogoMind大模型;后者通过蘑菇智途APP向存量智能网联车辆开放AI增强服务,例如实时路况预警、最优路径规划。”
目前,蘑菇车联已经推出了多款L4级前装量产智能驾驶车辆,包括 RoboBus、RoboSweeper 和RoboTaxi,在北京、上海、天津等十余个城市落地运营。
“目前MogoMind在核心数据指标上已经居于领先地位,推动城市交通从单点智能迈向全局智能。随着技术的成熟和数据的不断丰富,MogoMind大模型的性能将稳步提升,为政府、车企、智能驾驶系统等提供更好的全局感知和智能决策支持。”该业务负责人总结到。






